





























SprutCAM Tech’s Robot Calibration mobile app is designed to accurately calibrate the Tool Center Point (TCP) and automatically transfer the data to SprutCAM X Robot via a smartphone.
Tool Center Point (TCP) calibration is a process used in robotics to determine the position of a tool relative to the robot’s arm or body. This information is critical to ensuring the accuracy of the robot’s movements and the precision of its tool operations. The goal of TCP calibration is to find the exact position of the tool tip, which can then be used as a  reference point for the robot’s motion control system. This allows the robot to consistently and accurately perform tasks such as cutting, drilling and welding in the correct location. The calibration process typically involves measuring the positions of various points on the tool and using these measurements to calculate the position of the TCP.
reference point for the robot’s motion control system. This allows the robot to consistently and accurately perform tasks such as cutting, drilling and welding in the correct location. The calibration process typically involves measuring the positions of various points on the tool and using these measurements to calculate the position of the TCP.
The original version of the application only worked with the robots of three well-known manufacturers. The latest version of SprutCAM Tech’s Robot Calibration app now supports TCP calibration for the following robot brands: FANUC, Kuka, CRP, Denso, Dobot, Estun, Hiwin, Hyundai, Motoman, Newker, Manutec, Nachi, OTC Daihen and Turin.
SprutCAM Tech’s app uses the double spikes method for calibration:
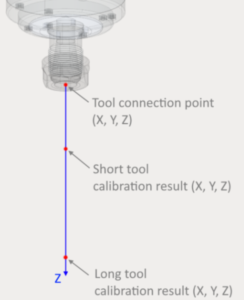 1st step. Measurement of the position of the long tool. The position of the tool is measured at different joint angles or at different positions along the robot path.
1st step. Measurement of the position of the long tool. The position of the tool is measured at different joint angles or at different positions along the robot path.
2nd step. Measurement of the short tool position and automatic determination of the tool orientation.
3rd step. Automatic recognition with OCR and reading of the data by the Robot Calibration application and calculation of TCP coordinates.
4th step. Transmission of TCP coordinates to MachineMaker using a QR code.
The double spikes method is a TCP calibration method used in robotic and machine tool applications. It consists of measuring two points on a probe and calculating the position of the tool center point based on these measurements. The purpose of TCP calibration is to determine the location of the TCP with respect to the robot’s base coordinate system so that it can be accurately positioned for machining or other operations. The double spikes method can be useful in situations where the probe is unable to measure the tool position at the exact TCP.
The Robot Calibration mobile app provides SprutCAM X Robot software users with the following benefits:
- Elimination of errors caused by manual data entry.
- Reduced robot debugging time.
- No need for expensive calibration tools or services.
- Ever-growing list of supported robots and mechanisms.
- The engineer interacts with the robot using a standard smartphone.
Download and use SprutCAM Tech’s Robot Calibration mobile app for free from Google Play and Apple Store.
About SprutCAM Tech
SprutCAM Tech team has been developing CAM software since 1987. During this long period we have gained extensive experience and expertise in Computer Aided Manufacturing. Our team consists of experts and practitioners in the technologies required to make CNC programming easier, faster and more efficient for our customers. Toolpath strategies and reliable simulation algorithms are all developed in-house by the SprutCAM Tech Team and serve as a solid foundation for our software. Our sales and support offices are located in Asia, Africa, North and South America, Europe and Australia. SprutCAM Tech has thousands of satisfied users worldwide: USA, Canada, Brazil, UK, Netherlands, Italy, Germany, Poland, Spain, China and elsewhere.








